Updated on Apr. 25, 2010.
動作状況の動画(YouTube)
回転スピード、向きを制御している様子です。
中央の黒いつまみにより回転速度を決定します。
5,6番ピンのどちらに5 Vを印加するかで回転方向を支持します。
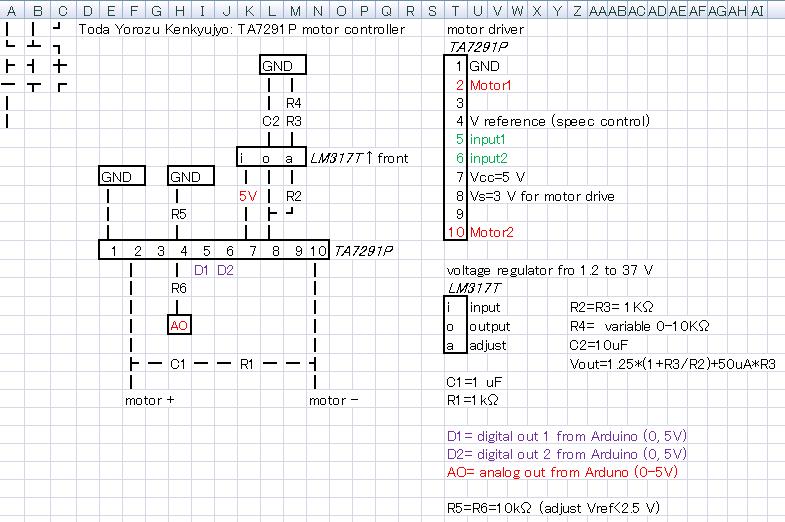
How to control a motor by TA7291P.
Rotational speed and direction are controlled by an analog circuit including TA7291P.
The center volume decide the speed.
The direction is chosed by 5 V-input to Input1(PIN NO.5) or Input2(PIN NO.6).
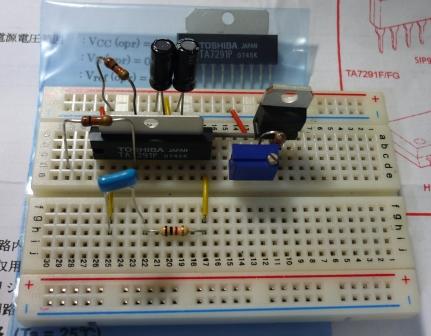
プレッドボード上に組み立てたモーター制御回路。
4番端子はテストのためツマミつきの可変抵抗を入れることにしました。
写真は抵抗を入れる前です。
Motor control circuit build on a test board.
PIN NO.4 is open in this image. Voltage of No.4 is adjusted by
a variable resistor for controlling the rotational speed.
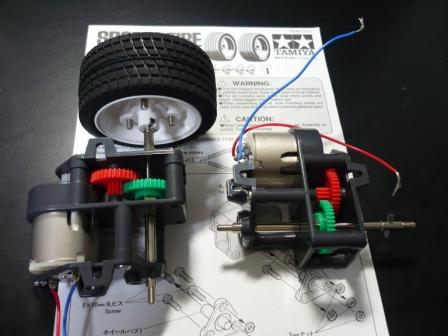
田宮模型のハイパワーギヤボックス/High Power Gear Box, TAMIYA
同じくスポーツタイヤ/Sports Tire Set, TAMIYA
組み立て後のギヤボックスとタイヤ
回転軸にピンを垂直に差し込む作業が少し大変でした。
専用の工具が無かったので、固い土台の上に固定して
小さい金槌で叩いて挿入していくとうまくいきました。
Assembled Gear boxes and a tire.
It was a liitle bit troublesome to put a pin to the shaft.
I used a tiny hammer to push the pin into the shaft on a fixed stage.